- Управление бездатчиковыми бесколлекторными двигателями Sensorless BLDC — новые решения и возможности
- Включение; Схема со средней точкой
- Обратная связь контроль напряжения фаз двигателя
- Задающие сигналы
- Задающие сигналы на основе изменения тока и напряжения:
- Задающие сигналы на основе магнитов:
- Настройка регулятора
- Схема регулятора
- Измерения аналоговых сигналов; Выбор частоты ШИМ
- Питание
- UART интерфейс
- Виртуальная средняя точка
- Запуск; Возможности прошивки
- Датчики Холла; ШИМ и сигналы для ключей
- Видео:
- Бесщеточный мотор с высоким КПД (ч.2) / BLDC motor high efficiency (p.2)
Управление бездатчиковыми бесколлекторными двигателями Sensorless BLDC — новые решения и возможности

В данной статье мы рассмотрим алгоритм управления бездатчиковыми бесколлекторными двигателями Sensorless BLDC. Это особый тип двигателей, который не требует наличия датчиков Холла для определения положения ротора. Вместо этого используется алгоритм, основанный на изменении фазы напряжения и обратной ЭДС.
Главное преимущество бездатчиковых двигателей Sensorless BLDC состоит в возможности управления моментом и скоростью в широких пределах. В то же время, их настройка может быть немного сложнее, чем у бесколлекторных двигателей с датчиками Холла.
Основной принцип работы бездатчиковых двигателей Sensorless BLDC заключается в следующем: сигналы ШИМ подаются на контрольные порты ESC (электронного регулятора скорости), который, в свою очередь, определяет следующий момент включения каждой фазы двигателя. Для этого используется алгоритм, который постоянно следит за изменениями напряжения и обратной ЭДС в фазах двигателя.
Однако, помните, что бездатчиковые двигатели Sensorless BLDC находятся в прочее стабильное положение только при средней скорости вращения. При высоких и низких скоростях могут возникнуть проблемы со стабильностью вращения, поэтому рекомендуется использовать датчики Холла.
Интерфейс управления бездатчиковыми двигателями Sensorless BLDC основан на цифровом входе ESC, который позволяет задать задающий момент и скорость вращения. Также, в рамках интерфейса можно изменить количество фаз, частоту ШИМ и другие параметры. Для более стабильного управления рекомендуется использовать antispark порт для сброса задающего момента и периода ШИМ в моменты включения двигателя.
Таким образом, управление бездатчиковыми бесколлекторными двигателями Sensorless BLDC требует отдельной настройки и контроля, но позволяет достичь высоких скоростей и моментов в пределах заданных параметров. Надеемся, что данная статья поможет вам разобраться в основах управления и настройки таких двигателей.
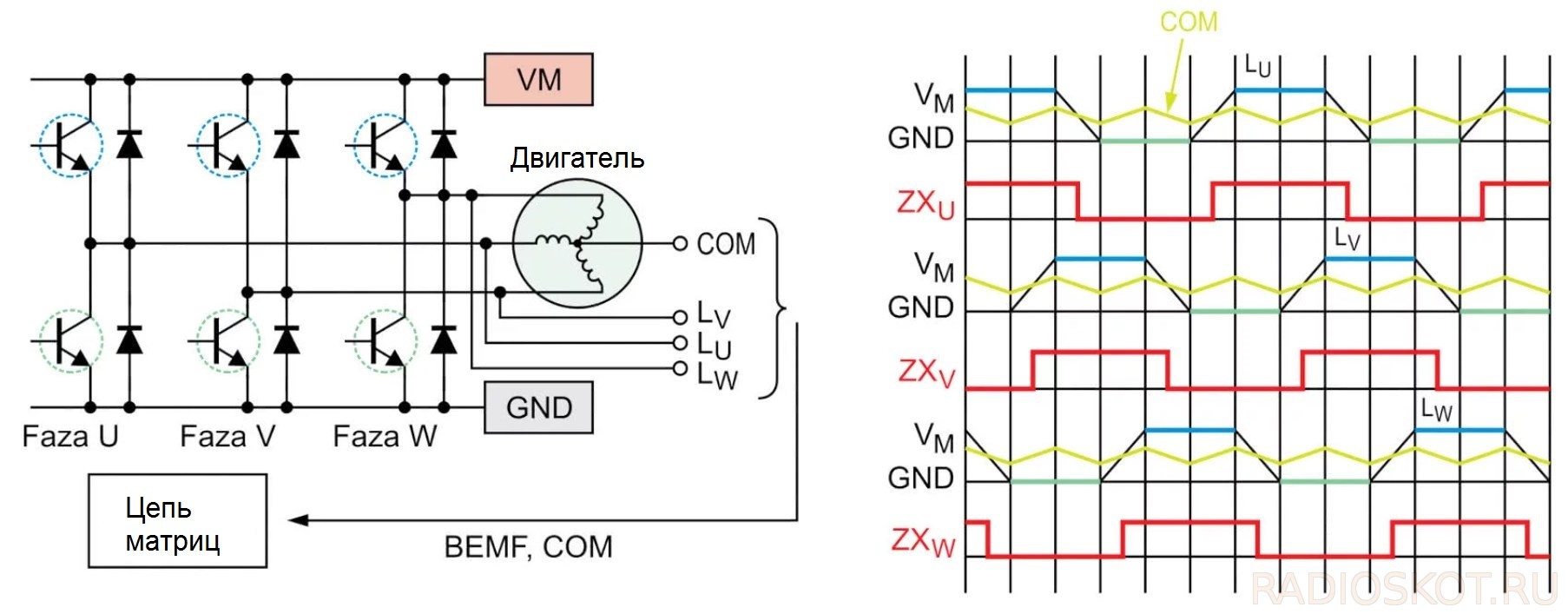
Включение; Схема со средней точкой
Для управления бездатчиковыми бесколлекторными двигателями (Sensorless BLDC) используется схема со средней точкой. Эта схема позволяет регулировать скорость вращения двигателя без использования датчиков Холла или других датчиков, обычно используемых для управления бесколлекторными двигателями.
В схеме со средней точкой входной сигнал напряжения разделяется на две части: на положительную и отрицательную. Положительная часть подключается к фазам двигателя, а отрицательная часть — к средней точке, которая обычно соединяется с землёй.
Двигатель можно запустить вращаться при напряжении питания выше нулевой уровня. Когда напряжение питания достигает заданного значения, начинается снижение напряжения на двигателе. При снижении напряжения происходит коммутация фаз двигателя, что вызывает смену направления вращения.
Сигналы могут быть обработаны различными способами для достижения нужной коммутации фаз двигателя. Описание таких способов выходит за рамки данной статьи.
Средняя точка схемы со средней точкой обычно соединяется с контактом датчика или сопротивлением. Когда сигналы на контакте датчика или сопротивлении меняются в соответствии с коммутациями фаз двигателя, то это позволяет определить текущую фазу двигателя.
Для настройки регулятора скорости и других параметров управления бездатчиковыми бесколлекторными двигателями может использоваться программное обеспечение или настройка через список параметров.
В итоге, схема со средней точкой позволяет управлять скоростью двигателя без использования датчиков, таких как датчики Холла. Это упрощает систему управления и улучшает надёжность работы. Однако, эта схема имеет некоторые особенности и требует определённой настройки, чтобы обеспечить правильную работу двигателя.
| Преимущества | Недостатки |
|---|---|
| — Упрощение системы управления | — Требует настройки регулятора скорости |
| — Улучшение надёжности работы | — Необходимость правильной коммутации фаз двигателя |
| — Возможность управления без использования датчиков Холла | — Требуется знание специфической техники управления |
Обратная связь контроль напряжения фаз двигателя
Обратная связь контроля напряжения фаз двигателя позволяет определить точное положение ротора без использования датчиков положения. Вместо этого используется алгоритм, который основан на изменении входных сигналов тока и напряжения во время коммутаций фаз двигателя.
Для работы алгоритма обратной связи контроля напряжения фаз двигателя необходимо провести калибровку. Во время калибровки микроконтроллер записывает значения входного напряжения и тока, а также частоту коммутаций на задающий порт. Затем с использованием этих данных можно определить положение ротора и управлять двигателей с высокой точностью.
Работа алгоритма обратной связи контроля напряжения фаз двигателя заключается в следующем. По мере вращения ротора, магнитные поля в фазах двигателя будут создавать различные аналоговые сигналы напряжения на выходе ESC. Путем сравнения этих сигналов сброс, который является настраиваемым пороговым значением, можно определить положение ротора и выполнить коммутацию фаз.
Обратная связь контроля напряжения фаз двигателя также используется для управления скоростью и направлением вращения двигателя. Она позволяет регулировать уровень напряжения питания и частоту коммутаций в зависимости от заданной скорости и положения ротора.
Обратная связь контроля напряжения фаз двигателя является важной частью управления бездатчиковыми бесколлекторными двигателями. Она позволяет достичь высокой точности управления скоростью и положением ротора, а также обеспечить надежную и эффективную работу двигателя без необходимости использования дополнительных датчиков.
Задающие сигналы
В задающих сигналах учитывается также информация о положении ротора двигателя, которая обеспечивается путем определения коммутаций фаз по изменению электрических параметров (тока или напряжения) на фазах двигателя.
Схема формирования задающего сигнала включает в себя использование специального микроконтроллера, который умеет работать с бездатчиковыми двигателями. Коммутация фаз осуществляется по сигналу широтно-импульсной модуляции (ШИМ) через порт силовой схемы.
Задающие сигналы на основе изменения тока и напряжения:
Одним из методов формирования задающего сигнала является использование информации о изменении тока или напряжения на фазах двигателя. Для этого необходимо наличие датчика тока или напряжения на каждой фазе.
Регулятор на основе изменения тока работает следующим образом: уровень тока на фазе измеряется при помощи датчика, а затем рассчитывается среднее значение тока на всех фазах. Напряжение задающего сигнала соответствует среднему значению тока.
Регулятор на основе изменения напряжения работает аналогично: уровень напряжения на фазах измеряется при помощи датчика, а затем рассчитывается среднее значение напряжения на всех фазах. Таким образом, напряжение задающего сигнала соответствует среднему значению напряжения.
Задающие сигналы на основе магнитов:
Еще одним методом формирования задающего сигнала является использование информации о положении ротора двигателя, которая может быть получена путем измерения магнитного поля. Для этого используются датчики магнитов или магнитные датчики на роторе.
Описание задающего сигнала на основе магнитов следующее: по мере вращения ротора, магниты на нем будут проходить мимо датчиков, что будет вызывать изменение электрических параметров в цифровом интерфейсе микроконтроллера. Задача регулятора — определить момент срабатывания каждого датчика магнитов и задать точки коммутации фаз в соответствии с этими моментами.
| Список задающих сигналов | Описание |
|---|---|
| Датчики тока и/или напряжения | Задающий сигнал рассчитывается на основе изменения тока или напряжения на фазах двигателя. |
| Магниты | Задающий сигнал формируется на основе информации о положении ротора, полученной с помощью датчиков магнитов или магнитных датчиков на роторе. |
Настройка регулятора
Настройка регулятора включает в себя определение различных параметров и режимов работы, чтобы обеспечить эффективное управление бездатчиковыми бесколлекторными двигателями. В процессе настройки регулятора обычно устанавливаются следующие параметры:
— Числовое значение, величина которого рассчитывается на основе напряжения питания и характеристик двигателя, определяет частоту, с которой регулятор будет измерять момент двигателя. Это значение может быть изменено в прошивке микроконтроллера.
— Задающий сигнал, который определяет желаемую скорость вращения двигателя. Обычно это сигнал с аналогового входа или PWM.
— Период измерения момента. Это время, через которое регулятор будет считывать значение момента от двигателя. Обычно в пределах нескольких миллисекунд.
— Точка сброса момента. Это значение момента, при достижении которого регулятор переходит в режим сброса. В этом режиме он может прекращать входной сигнал и уменьшать скорость вращения двигателя.
Схема регулятора
Схема управления бездатчиковыми бесколлекторными двигателями обычно состоит из нескольких блоков:
— Силовая ступень, которая питает двигатель и защищает регулятор от перегрузок и короткого замыкания.
— Цифровой регулятор, который работает на основе измерения момента двигателя и управляет входным сигналом, чтобы изменить скорость вращения двигателя.
— Блок измерения момента и скорости, который использует датчики Холла или другие способы измерения, чтобы определить положение и скорость вращения двигателя.
— Виртуальная память, в которой хранятся данные о калибровке и настройках регулятора.
— Интерфейсы, такие как UART, которые позволяют использовать компьютер или другие устройства для изменения настроек регулятора.
Описание схемы и настройка регулятора подробно описаны в статье.
Измерения аналоговых сигналов; Выбор частоты ШИМ
Уровень широты импульса ШИМ определяет скорость вращения двигателя. В зависимости от требуемой скорости и момента вращения, можно задать конкретную частоту ШИМ. Стоит отметить, что при повышении частоты ШИМ увеличивается разрешение скоростных режимов работы двигателя.
Для измерения аналоговых сигналов, таких как скорость и момент двигателя, обычно используется шунт. Шунт — это сопротивление, через которое протекают токи двигателя. Измеряя падение напряжения на шунте, можно определить величину этих токов.
Выбор частоты ШИМ влияет на точность измерений скорости и момента двигателя. Если частота ШИМ слишком низкая, то точность измерений будет недостаточной для стабильного контроля скорости в пределах средней и высокой скорости вращения двигателя. С другой стороны, если частота ШИМ слишком высокая, то это может привести к снижению момента двигателя и повышению потребления энергии.
Поэтому, выбор оптимальной частоты ШИМ имеет важное значение для правильного управления бездатчиковыми бесколлекторными двигателями.
Частота ШИМ также должна быть согласована с частотой цифрового управляющего сигнала двигателя. Для этого обычно используется пропорциональное соотношение и задающий феншую алгоритм.
| Частота ШИМ | Частота цифрового управляющего сигнала | Задающий феншую алгоритм |
|---|---|---|
| Низкая (менее 8-ми кГц) | Высокая (несколько десятков кГц) | Стабильное управление скоростью в пределах средней скорости вращения двигателя |
| Средняя (8-20 кГц) | Средняя (несколько десятков кГц) | Стабильное управление скоростью в пределах средней и высокой скорости вращения двигателя |
| Высокая (более 20 кГц) | Высокая (несколько десятков кГц) | Полномасштабное управление скоростью вращения двигателя |
Итак, выбор частоты ШИМ является важным этапом при управлении бездатчиковыми бесколлекторными двигателями Sensorless BLDC. При выборе оптимальной частоты ШИМ необходимо учитывать требования по точности, потребляемой мощности и скорости вращения двигателя.
Питание
Для питания бездатчиковых бесколлекторных двигателей (Sensorless BLDC) обычно используются батареи. Это связано с тем, что подобные двигатели в большинстве случаев применяются в портативной технике, где необходимо обеспечить мобильность и независимость от сети. Батареи обеспечивают постоянное напряжение, которое необходимо для работы двигателей.
Если же речь идет о промышленном использовании, то в этом случае питание бездатчиковых бесколлекторных двигателей может быть осуществлено со сети переменного тока. В таком случае требуется соответствующее оборудование для преобразования переменного тока в постоянный.
UART интерфейс
UART (Universal Asynchronous Receiver/Transmitter) интерфейс является стандартным средством связи между микроконтроллером и внешними устройствами. Данный интерфейс используется для передачи информации в виде последовательных битов через одну силовую линию.
В случае управления бездатчиковыми бесколлекторными двигателями с помощью UART интерфейса, микроконтроллер передает команды двигателю в виде битовых последовательностей. Данные команды управляют скоростью вращения двигателя, его направлением и другими параметрами.
Виртуальная средняя точка
В контексте управления бездатчиковыми бесколлекторными двигателями, виртуальная средняя точка играет важную роль. В бездатчиковых двигателях нет датчиков Холла или магнитов, которые определяют положение ротора. Поэтому необходимо использовать другие методы для определения положения ротора и правильного вращения.
Виртуальная средняя точка — это положение ротора, в котором двигатель не производит никакого момента. Это положение может быть рассчитано на основе информации о коммутации и фазовом токе двигателя. По данным измерений можно определить момент времени, когда необходимо изменить коммутацию ключей для поддержания виртуальной средней точки.
Виртуальная средняя точка позволяет корректировать коммутацию в соответствии с изменениями положения ротора и обеспечивает более точное управление двигателями в различных режимах работы.
Запуск; Возможности прошивки
Для запуска бездатчикового бесколлекторного двигателя требуется специальный алгоритм управления. В отличие от обычных коллекторных двигателей, которые запускаются с помощью постоянного напряжения, управление бездатчиковыми бесколлекторными двигателями требует использования специальных коммутаций фаз.
Когда двигатель запускается, контроллер должен определить начальное положение ротора. Для этого используется алгоритм сброса фаз, который с помощью короткого замыкания фаз обеспечивает запуск двигателя. Затем контроллер начинает рассчитывать сигналы коммутации на основе текущего положения ротора и задающего сигнала скорости.
Управление бездатчиковыми бесколлекторными двигателями обычно осуществляется с помощью микроконтроллера и специального регулятора скорости. Микроконтроллер генерирует сигналы коммутации для управления фазами двигателя. Регулятор скорости контролирует частоту и момент вращения двигателя, а также количество фазных коммутаций.
Для управления бездатчиковыми бесколлекторными двигателями также можно использовать датчики скорости, такие как энкодеры или датчики Холла. Однако, в отличие от бесколлекторных двигателей с датчиками, бездатчиковые двигатели не требуют постоянного контроля положения ротора. Вместо этого они использование алгоритмов и датчиков для определения положения ротора и точки коммутации.
При управлении бездатчиковыми бесколлекторными двигателями также нужно помнить о возможностях прошивки. Во-первых, прошивка должна иметь возможность настройки параметров запуска и контроля скорости. Во-вторых, прошивка должна иметь возможность измерения входного напряжения и тока, чтобы контролировать питающую мощность и защищать двигатель от перегрузок. Также прошивка может предоставлять дополнительные возможности, такие как настройка точки коммутации или использование аналоговых входов для задающих сигналов скорости и момента.
Датчики Холла; ШИМ и сигналы для ключей
Управление бездатчиковыми бесколлекторными двигателями Sensorless BLDC возможно благодаря использованию датчиков Холла и соответствующим сигналам для коммутации фаз двигателя. Датчики Холла обеспечивают информацию о магнитных полях вращающегося ротора, что позволяет микроконтроллеру определить положение ротора и правильно коммутировать фазы двигателя.
Датчики Холла обычно размещаются на статоре двигателя в близости к его фазами. Они имеют форму маленьких магнитов и подключаются к микроконтроллеру через входной контакт или интерфейс. С помощью датчиков Холла микроконтроллер может определить положение ротора и синхронизировать коммутацию фаз двигателя.
ШИМ (Широтно-импульсная модуляция) используется для управления скоростью вращения двигателя. ШИМ-сигналы подаются на ключи (транзисторы) в силовой схеме, которая управляет фазами двигателя. Задающий сигнал микроконтроллера определяет ширину и частоту ШИМ-сигналов, регулируя скорость двигателя.
Кроме ШИМ-сигналов, микроконтроллер может генерировать и другие сигналы для управления коммутациями фаз. Например, виртуальная точка нуля (Zero-Crossing Point) может быть использована для определения времени коммутации фазы. Точка нуля определяется как момент, когда ток через фазу пересекает свое среднее значение или сопротивление шунта. Этот сигнал можно использовать для настройки зажима фазы и обеспечения определенной точки коммутации.
Для управления и настройки датчиков Холла и сигналов для ключей используется программное обеспечение (прошивка) микроконтроллера. В прошивке можно задать временные параметры, такие как точка коммутации фазы и точка нуля, а также настроить режимы управления и регулирования скорости двигателя. Также можно настроить антипереключение ключей (antispark) и другие функции.
Список сигналов и настройка датчиков Холла, точек коммутации фазы и других параметров может быть задан в виде числового списка в прошивке микроконтроллера. Поэтому важно правильно настроить и настроить параметры для достижения требуемой производительности и эффективности двигателя.
Видео:
Бесщеточный мотор с высоким КПД (ч.2) / BLDC motor high efficiency (p.2)
Бесщеточный мотор с высоким КПД (ч.2) / BLDC motor high efficiency (p.2) by Sergey Dorosh 27,881 views 2 years ago 15 minutes